Возможен ли «мягкий» маховик?
Что касается супермаховиков, у которых энергия отбирается электрическим или гидравлическим путем, то тут все ясно. Электро– и гидроприводы можно регулировать «мягко», так что «потребитель» и не догадается об изменении скорости супермаховика.
Особенно успешно регулируется гидропривод. Гидронасос состоит из нескольких поршеньков, приводимых в движение шайбой, к которой они шарнирно прикреплены. Шайба обычно наклонена таким образом, что за один ее оборот поршенек проделывает вместе с ней некоторый путь вверх-вниз. Уменьшив угол наклона шайбы, поставив ее почти параллельно поршенькам, ход последних можно сделать едва заметным, с увеличением угла наклона увеличится и ход поршеньков. Такая регулировка позволяет менять скорость вращения вала от нулевой до самой высокой.
Предположим, на автомобиле установлены обычный гидродвигатель и супермаховик с гидравлическим приводом, причем на супермаховике – регулируемый насос. Как будет производиться движение машины?
Сначала шайба насоса чуть наклоняется, в гидродвигатель подается немного масла, и он тихонько «трогает» автомобиль. По мере его разгона шайба наклоняется все больше и больше, повышая мощность насоса, а стало быть, и скорость автомобиля. Если супермаховик только что «заряжен» и скорость вращения его высока, то можно ограничиться малым наклоном шайбы; если же скорость вращения основательно упала, то надо увеличить угол наклона, и скорость автомобиля не изменится. Конечно, когда шайба дойдет до предельного положения, регулировка будет уже неэффективна.
Обычно допускается снижение скорости вращения супермаховика вдвое, например с 12 до 6 тыс. оборотов в минуту. Но не следует думать, что и энергии его мы используем тоже половину. Так как при снижении скорости вдвое энергия супермаховика уменьшается в 22, то есть в четыре раза, соответственно мы получаем от него 3/4, или 75 %, всей энергии. Вот какой «глубокий» отбор полезной энергии можно произвести от маховичных накопителей.
Точно так же обстоит дело и с электроприводом, только вместо шайбы здесь применяется так называемое частотное управление. Оно современно и хорошо разработано, мы даже используем его в бытовых приборах, например в вентиляторах.
Но как ни удобны электро– и гидроприводы, они все-таки сложны. КПД – около 0,8-0,9, бывает и чуть повыше, – преобразование механической энергии в поток жидкости или электронов требует затрат – «налога» на это преобразование. Их масса велика, да и стоят они недешево. А главное, эти приводы не позволяют отобрать у маховика всю энергию, довести его до остановки. Почему же нельзя получить от маховика больше энергии?
Дело в том, что всякий привод хорошо работает только на той скорости, на которую он рассчитан. Если скорость супермаховика сильно снижается, то электрогенератор, соединенный с ним, дает слабый ток, а гидронасос – невысокое давление масла. Привод становится маломощным, КПД его падает. Вот потому-то оставшаяся в супермаховике четверть всей накопленной энергии, как правило, не используется.
Сказанное относится к разгону автомобиля. А что происходит при его торможении? Ведь чтобы не потерять при этом кинетическую энергию автомобиля, нам надо перекачать ее в супермаховик.
Для привода безразлично, передавать ли энергию от супермаховика автомобилю или от автомобиля супермаховику. Поэтому на схемах обычно изображают автомобиль в виде супермаховика на одном валу привода, а супермаховик-накопитель – на втором. Так вот, электро– или гидропривод сумеет отобрать у автомобиля, как и у супермаховика, те же 75 % энергии, снизив его скорость лишь вдвое. А куда годится такое торможение, после которого автомобиль все еще движется, хотя и в два раза медленнее?!
И я стал придумывать привод, который мог бы «перекачивать» энергию автомобиля в супермаховик и наоборот практически полностью, – своего рода «энергетический насос», способный отбирать энергию у супермаховика до самой его остановки. Причем КПД этого привода-насоса должен быть выше, чем у любого другого типа привода. Что и говорить, задача была не из легких. Но неожиданно мне повезло. Однажды я увидел во сне… магнитофон. Вот этот магнитофон, вернее, его вращающиеся кассеты и натолкнули меня на правильное решение. Для проверки своей мысли я изготовил специальные кассеты, где намотка начиналась почти от самого вала, и, поставив их на магнитофон, включил его в режиме перемотки.
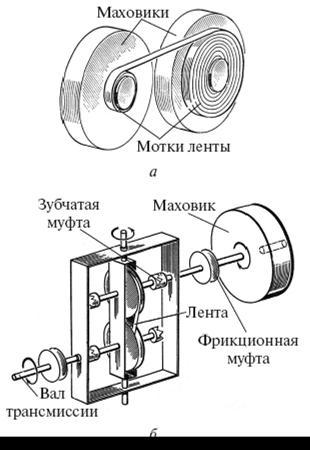
«Магнитофонный» привод (а) и схема рекуператора энергии на его основе (б)
В то время как одна кассета, на которой ленты было немного, трогалась с места, другая, полная кассета, почти не проворачивалась. Затем, по мере намотки ленты на первую кассету, вторая разгонялась все больше и больше. Наконец, когда первая кассета заполнилась, ее скорость вращения стала едва заметной. Зато вторая кассета, с которой лента смоталась, вращалась очень быстро, совсем как разогнанный супермаховик.
Идея была найдена, далее следовала техническая работа. Не вдаваясь в подробности изготовления привода, хочу сказать, что ленту для него я взял такую же, какую использовал в супермаховиках – стальную, толщиной 0,1 мм и шириной 40 мм.
«Магнитофонный» привод позволял передавать энергию от автомобиля супермаховику или, что одно и то же, от одного супермаховика другому, почти без потерь – на 99 %! При торможении автомобиля неподвижный супермаховик разгонялся, принимая чуть ли не всю энергию автомобиля и доводя его практически до остановки, а затем разгонял неподвижный автомобиль примерно до той же скорости, что была у него до торможения. Сам супермаховик при этом останавливался.
«Магнитофонный» привод был признан изобретением, и мне выдали на него авторское свидетельство.
Хотя этот привод получился значительно легче, меньше и экономичнее любого другого привода для разгона и торможения машин, он работал как бы по заданной программе, всегда одинаково. Регулировать его надо было заранее, до пуска. А ведь автомобиль приходится тормозить и разгонять в зависимости от того, какая ситуация на дороге. Вот для метропоезда, движению которого почти ничего не мешает, магнитофонный привод, наверное, подошел бы. Для автомобиля же лучше поискать что-нибудь иное.
Чтобы полнее использовать энергию маховика и регулировать скорость его вращения без какого-либо привода, можно менять расположение массы в маховике, то есть либо отодвигать ее от оси вращения, либо приближать к ней. Всем известно, чтобы вращаться быстрее, например в танцах на льду или на так называемой скамье Жуковского, человеку надо сгруппироваться, «собрать» руки и плечи поближе к туловищу. Для замедления вращения ему следует, наоборот, раскинуть руки пошире, отодвигая тем самым часть массы подальше от оси вращения. Лучше держать в это время в руках грузы, например гантели. Так и в маховике: если изготовить его части раздвижными, то складывая части, можно ускорить вращение, а раздвигая, – замедлить. И это все при постоянном запасе энергии в маховике.
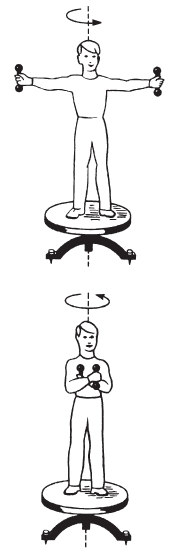
«Человеческая» модель «раздвижного» маховика
Задача создания «раздвижных» маховиков уже давно привлекает изобретателей. Однако большинство энтузиастов избирают неверный путь. Об этом можно судить хотя бы по тому, что на высоких оборотах их маховики отказываются работать.
Многие устройства – почти точное повторение раздвижного патрона токарного станка. Только грузы в них раздвигаются винтами или рычагами. Я уже говорил, что при вращении маховика его частицы, стремясь двигаться по инерции, то есть прямолинейно, а не по кругу, создают настолько большие усилия, что рвут монолитную сталь. А здесь все эти гигантские силы приходятся на винты, рычажки и другие «хлипкие» механизмы. Где им устоять? Поэтому и рвутся «раздвижные» маховики, не достигая и десятой доли энергоемкости даже обычных маховиков. Их авторы будто заранее позаботились о размерах и массе осколков, специально разрезав монолитный маховик на части и скрепив их непрочными связями.
Не лучше показали себя заливные и насыпные маховики. Такие маховики изготовляют полыми, в виде бочки, и для увеличения инертности заполняют водой, ртутью или даже дробью. Когда же нужно уменьшить инертность, заполнитель либо изымают из маховика, либо тем или иным способом «стягивают» к центру.
Но изобретатели не учитывают, что жидкость или дробь сами не несут своей нагрузки. Все усилия, связанные со стремлением «вырваться» из кругового движения, заполнитель перекладывает на тонкую стенку полого маховика. Жидкость, а тем более дробь, при вращении создает в маховике давление в тысячи атмосфер (сотни мегапаскалей), которое без труда взрывает тонкостенный сосуд – маховик. Попытки сделать стенку толстой не приносят успеха – слишком мало остается места для жидкости, и сосуд превращается в заурядный монолитный маховик.
Другой порок «заливных» маховиков заключается в очень малом КПД. При заливке жидкости на ходу почти половина кинетической энергии маховика переходит в тепло, так как жидкость тормозит маховик, а при изъятии жидкости из маховика теряется вся ее кинетическая энергия – ведь жидкость нужно как бы остановить, сделать неподвижной. Как же быть с изъятием жидкости, если она будет иметь колоссальное давление и сверхзвуковую скорость? Тогда ее никаким насосом не откачаешь!
Вот если бы жидкость, дробь и прочие заполнители сами несли свою нагрузку да еще обладали высокой прочностью… А почему бы не применить в качестве заполнителя стальную ленту – ту, что идет на намотку супермаховика? Пусть она наматывается на вал в центре такого же ленточного супермаховика, понижая его инертность, и, наоборот, сматывается с вала, прижимается к внутренней поверхности ленточного обода, повышая инертность супермаховика. К тому же лента-заполнитель сама несет свою нагрузку.
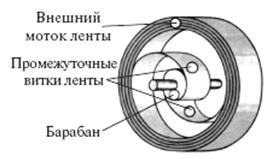
«Мягкий» супермаховик
Вышел обычный ленточный супермаховик, в котором лента, однако, была склеена только на поверхности обода. Отходя от обода в виде двух или нескольких витков, она дальше наматывалась уже без клея. Когда намотка достигла вала супермаховика, я закрепил на нем концы ленты. Сам супермаховик был посажен на этотвал свободно в подшипниках. Стоило теперь остановить вал, и лента начинала навиваться на него, уменьшая инертность супермаховика. Скорость его вращения при этом увеличивалась.
Картина получалась парадоксальная – супермаховик никто не разгоняет, он предоставлен самому себе, и все же он разгоняется! И будет разгоняться до тех пор, пока вся энергия, накопленная в супермаховике, не перейдет в тонкий внешний слой и не разорвет его!
Это явление напоминает эффект кнута. При ударе об пол вся кинетическая энергия длинного кнута переходит в его кончик, поскольку центральная часть кнута, прикоснувшись к полу, останавливается. Сосредоточившись в самом кончике, кинетическая энергия так сильно разгоняет его, что мы слышим резкий взрывообразный звук, а кончик кнута при этом нередко отрывается.
Практическая польза от саморазгоняющегося супермаховика очевидна – время от времени разгоняя маховик его же энергией, мы обеспечиваем наивыгоднейшие условия работы привода, ведь супермаховик до выделения всей своей энергии вращается с постоянной скоростью. А чтобы отпущенный вал не раскручивался в обратную сторону, его надо связать с супермаховиком храповой муфтой, допускающей вращение только в одну сторону.
Соединив вал подобного маховика с машиной, мы повысим «мягкость» рабочей характеристики – ценнейшее свойство для большинства машин. В чем выражается эта «мягкость»? При торможении обычного маховика он сразу не замедлится – таково свойство маховиков. Если мы затормозим его слишком сильно, то либо вал, либо другая деталь сломаются. Рабочую характеристику в этом случае называют «жесткой».
Если же мы попытаемся остановить таким образом вал «мягкого» супермаховика, то он сперва поддастся, замедлится. Потом мы почувствуем, что вал как бы набирает силу, – на него навиваются все новые и новые витки ленты, диаметр намотки растет, – и мы уже не в состоянии удержать его – вал прокрутится. Чуть отпустив вал, мы тем самым ослабим нагрузку, и вал раскрутится быстрее супермаховика, передавая ему лишние витки ленты. Вот такая характеристика – «мягкая»!
«Мягким» супермаховиком можно производить, например, плавные торможения и разгоны машин. Он способен работать даже в режиме «часовой пружины», только в тысячи раз более энергоемкой. Правда, «заводить» такую пружину посложнее, чем обычную.
Мои конструкции «самонесущих» маховиков переменной инертности тоже были признаны изобретениями.
